Resistencia. Es cuando la carga actúa y produce deformación. Es la capacidad de un cuerpo para resistir una fuerza aun cuando haya deformación.
Rigidez. Es cuando la carga actúa y NO produce deformación. Es la capacidad de un cuerpo para resistir una fuerza sin deformarse.
Carga estática. Se aplica gradualmente desde en valor inicial cero hasta su máximo valor.
Carga dinámica. Se aplica a una velocidad determinada. Pueden ser: Carga súbita, cuando el valor máximo se aplica instantáneamente; Carga de choque libre, cuando está producida por la caida de un cuerpo sobre un elemento resistente y Carga de choque forzado, cuando una fuerza obliga a dos masas que han colisionado a seguir deformándose después del choque.
Ecuaciones de equilibrio. El equilibrio de un cuerpo requiere un balance de fuerzas para impedir que el cuerpo se traslade o tenga un movimiento acelerado a lo largo de una trayectoria recta o curva, y un balance de momento para impedir que el cuerpo gire. Estas condiciones pueden expresarse de manera matemática mediante dos ecuaciones vectoriales.
Si se fija un sistema de coordenadas x,y,z con el origen en el puento 0, los vectores de fuerza y de momento pueden separarse en componentes a lo largo de los ejes coordenados y en las dos consecuciones anteriores pueden escribirse en forma escalar como seis ecueciones, consideradas como.
Con frecuencia, en la practica de la ingeniería, la carga sobre un cuerpo puede representarse como un sistema de fuerza se encuentran en el plano x-y, entonces las condiciones para el equilibrio del cuerpo pueden especificarse mediante solo tres ecuaciones escalares de equilibrio, que son:
Cargas internas resultantes.
En la mecánica de materiales, la estática se usa principalmente para determinar las cargas resultante que actúan dentro de un cuerpo. Por ejemplo así como se muestra en la figura (a) de abajo que se mantiene en equilibrio mediante las cuatro fuerzas externas. A fin de obtener las cargas internas que actúan sobre un región específica dentro del cuerpo, es necesario hacer una sección imaginaria o "corte" a través de la región donde van determinarse las cargas internas. Después las ods partes del cuerpo se separan y se dibuja un diagrama de cuerpo libre de una de las partes, figura (b). Aunque la distribución exacta de la carga interna puede ser desconocida, pueden usarse las ecuaciones de equilibrio para relacionar las fuerzas eternas sobre la parte inferior del cuerpo con a fuerza y el momento de resultante de la distribución, en cualquier punteo especifico o sobre el área seccionada, figura (c).
Tres dimensiones: Con la distribución de fuerza en el área seccionada y se desarrollarán ecuaciones que puedan usarse para el análisis y diseño del cuerpo. Entonces, puede definirse cuatro diferentes tipos de carga resultantes de la siguiente manera:
Fuerza normal, N. Esta fuerza actúa perpendicularmente al área. Se desarrolla siempre que las cargas externas tienden a empujar o jalar sobre los dos segmentos del cuerpo.
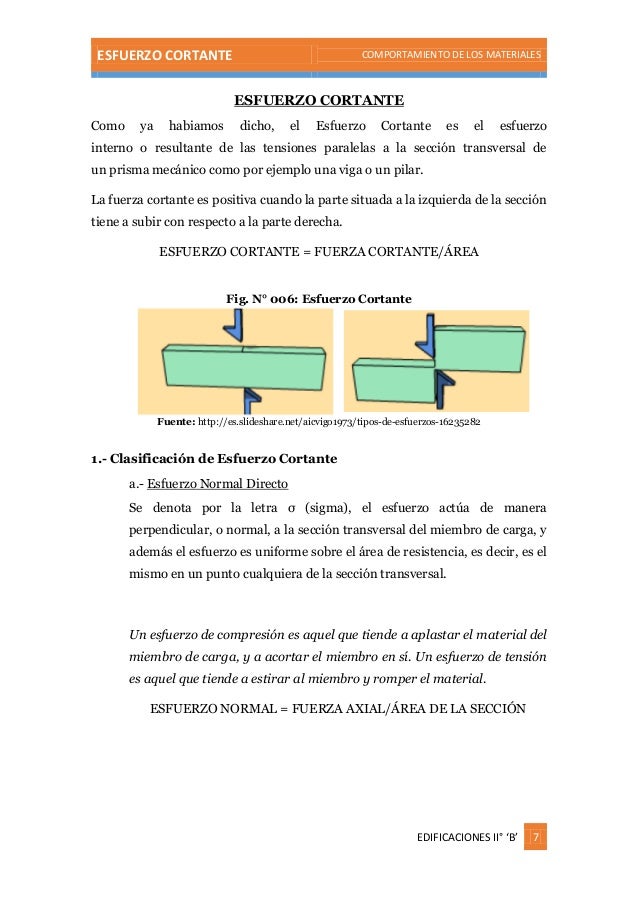
Esfuerzo cortante, V. Se encuentra en el plano del área y se desarrolla cuando las cargas externas tienden a ocasionar que los dos segmentos del cuerpo se deslicen uno sobre el otro.
Momento de torsión o torques, T. Este efecto se desarrolladas cargas externas tienden a torcer un sementó del cuerpo con respecto al otro alrededor de un eje perpendicular al área.
Momento flexionante, M. Es causado por las cargas externas que tienden a flexionar el cuerpo respecto a un eje que se encuentra dentro del plano del área.
Cargas copla nares.
Si el cuerpo está sometido a un sistema de fuerzas copla nares, figura (a), entonces en la sección sólo existen componentes de fuerzas normal, de fuerza cortante y de momento flexionarte, figura (b).
Soportes
Estado de pie, el piso nos soporta; sentados en una silla, ésta nos soporta.
Ahora veremos cómo los cuerpos se mantienen en su lugar o están unidos a otros. Las fuerzas y pares ejercidos sobre un cuerpo por sus soportes se denominan reacciones, lo que expresa el hecho de que los soportes "reaccionan" a las otras fuerzas y pares, o cargas, que actúan sobre el cuerpo. Por ejemplo, un puente se sostiene gracias a las reacciones ejercidas por sus soportes, y las cargas son las fuerzas ejercidas por el peso del mismo puente, el tránsito que lo cruza, y el viento.
Algunos tipos muy comunes de soportes se representan con modelos estilizados llamados convenciones de soporte.
Soporte de pasador. Tenemos un soporte de pasador; un soporte al cual está unido un cuerpo (ej., una viga) con un pasador liso que pasa por el soporte y el cuerpo. La parte (b) es una vista lateral.
Para entender que reacciones pueden generar un soporte de pasador, imaginémonos sosteniendo una barra unida a un soporte soporte de pasador (fig. c). Si tratamos de mover la barra sin hacerla girar (es decir, trasladar la barra), el soporte ejerce una fuerza reactiva que lo impide. El soporte no puede generar un par respecto al eje del pasador para impedir el giro. Así un soporte no puede generar un par respecto al eje del pasador pero si puede ejercer una fuerza sobre un cuerpo en cualquier dirección, lo que comúnmente se expre representando la fuerza en términos de sus componentes (d). La flecha indica las direcciones de las reacciones si Ax y Ay son positivas.
(a) Soporte de pasador. (b) Vista lateral que muestra el pasador atravesando la viga. (c)Sujetando una barra soportada. (d) El soporte de pasador es capaz de generar dos componentes de furza.
Soporte de rodillo. Es un soporte de pasador montado sobre rueda. Como el soporte de pasador, el de rodillo no puede generar un par respecto al eje del pasador. Como se puede mover con libertad en la dirección paralela a la superficie sobre la que rueda, no puede generar una fuerza paralela a la superficie sobre la que rueda, no puede generar una fuerza paralela a la superficial sino una fuerza normal (perpendicular) a ella (b). Las figuras (c-e) son otras convenciones usadas comúnmente como equivalente al soporte de rodillo.
(a) Soporte de rodillos. (b) La reacción consiste en una fuerza normal a la superficie. (c-e) Soporte equivalentes al soporte de rodillos.
Soporte de empotramiento. O también soporte fijo, presenta el objeto soportado literalmente empotrado en la pared como sre muestra en la figura de abajo. El termino Ma es el par generado por el soporte y la flecha curva indica su dirección. Los postes de barda y los del alumbrado público tiene soportes de empotramiento.
(a) Un empotramiento. (b) Sujetando una barra empotrada. (c) Racciones que un empotramiento es capaz de gener
1. La viga de la figuraatienes soportes y de rodillo, y está sometida a una fuerza de 2kN. ¿Qué valor tiene las reacciones en los soportes?
a
SOLUCIÓN
Dibujo del diagrama de cuerpo libre. Aislamos la viga y mostramos las cargas y reacciones que pueden generar los soportes de pasador y de rodillo (fig. b). Hay tres reacciones desconosidas: dos componentes de fuerza, Ax y Ay, en el soporte de pasador y una fuerza B en el soporte de rodillo.
(b) Dibujo del diagrama de cuerpo libre de la viga.
Aplicación de las ecuaciones de equilibrio. Sumando los momentos respecto al punto A, las escueciones de equillibrioson:
Resolviendo estas ecuaciones, las reacciones son Ax = 0.69 kN, Ay = 0.80 kN y B = 1.39 kN. La carga las reacciones se muestran el la figura de abajo. Es un buena costumbre mostrar las respuestas de esta manera y verificar que se cumplan las ecuaciones.
La crga y las reacciones.
2. El cuerpo esta empotrado y sometido a dos fuerzas y un par. ¿Qué valor tiene las reacciones en el empotramiento?
SOLUCIÓN
Dibujat diagrama de cuerpo libre. Aislamos el cuerpo de su soporte y mostramos las reacciones en el empotramiento. Hay tres reacciones desconocidas: dos componente de fuerza Ax y Ay y un par Ma(recuerda que podemos escoger arbitrariamente las direcciones de esas flechas). Descomponemos tambien la fuerza de 100 lb en sus componentes.
Aplicar ecuaciones de equilibrio. Sumando los momentos respecto al puento A. las ecuaciones de equilibrio son:
Al resolver esas ecuaciones obtenemos las reacciones Ax = -86.6 lb, Ay = 150.0 lb, y Ma = 73.2 lb-pie
UNIDAD 2: ESFUERZO
Se conciderá en primer lugar que el área seccionada está subdividida en áreas pequeñas, tal com el área ΔA mostrada en la figura 1-10a. Al reducir ΔA a un tamaño cada vez más pequeño, debe adoptarse dos supociones respecto a las propiedades de la materia. Se considerá que el material es cotinuo, es decir, que consiste en una distribueción uniforme o continuo de material que no contiene huecos. Además, el material debe ser cohesivo, lo que significa que todas sus partes están conectadas sí, sin fracturas, grientas o separaciones. En la figura 1-10ª se muestra una fuerza típica finita pero muy pequeña ΔF, la cual actúa sobre sú area asociada ΔA. Esta fuerza, como todas las demás. Tendrá uan dirección única, pero para el análisis que se presenta a continuación se remplazará por sus tres componetes, ΔFx, ΔFy y ΔFz,que se toman tangente, tangente y normal al área, respectivamente. Cuando ΔA y sus componetes hacen lo mismo; sin embargo, el cociente de la fuerza y el área tenderán en general a un límite finito. Este cociente se llama esfuerzo y se describe la intencidad de la fuerza interna sobre un plano específico (área) que pasa a través de un punto.
Esfuerzo normal. La intencidad de la fuerza que actúa en forma normal a ΔA se define como el esfuerza normal, σ (sigma). Como ΔFz es normal al área, entonces:
ESFUERZOS NORMALES AXIALES Definición 1: Esfuerzos normales, som aquellos debidos a fuerzas perpendiculares a la sección transversal. Definición 2: Esfuerzo axiales, son aquellos debidos a fuerzas que actúan a lo largo del eje del elemento.
Los esfurzos normales axiales por lo general ocurren en elementos como cable, barra o columnas sometidos a fuerzas axiales (que actúan a lo largo de su propio eje), las cuales pueden ser de tensión o de comprención. Además de tener resistencia, los materiales deben tener rigidez, es decir capacidad de oponerse a las deformaciones (d) puesto que una estructura demasiado deformable puede llagar a ver comprometida su funcionalidad y obviamente su estética. En el caso de fuerzas axiales (de tensión o compresión), se producirán en el elemento alargamientos o a cortamientos, respectivamente, como se muestra en la figura 10.
Figura 10
Una forma de comparar la deformación entre dos elementos, es expresarla como una deformación porcentual, o en otras palabras, calcular la deformación que sufrirá una longitud unitaria del material, la cual se denomina deformación unitaria e. La deformación unitaria se calculará como:
e=d/Lo
donde:
e: deformación unitaria,
d: deformación total.
Lo: longitud inicial del elemento deformado.
Esfuerzo cortante. La intencidad de la fuerza que actúa tengente a ΔA se llamaesfuerzo cortante, τ (tau). A continuación se presentan las componentes del esfuerzo cortante.
Observe que en esta notación el subíndice z indica la orientación del área ΔA, figura 1-11, y que x y y se usan para especificar los ejes a lo largo de los cuales actúan cada esfuerzo cortante.
Otra explicacion del esfuerzo cortante las fuerzas internas y sus correspondientes esfuerzos estudiados en las secciones 1.2 y 1.3, eran normales a la sección considerada. Un tipo muy diferente de esfuerzo se obtiene cuando se aplican fuerzas transversales P y a un elemento AB (figura 1.15). Al efectuar un corte en C entre los puntos de aplicación de las dos fuerzas (figura 1.16a), obtenemos el diagrama de la porción AC que se muestra en la figura 1.16b. Se concluye que deben existir fuerzas internas en el plano de la sección, y que su resultante es igual a P. Estas fuerzas internas elementales se conocen como fuerzas cortantes, y la magnitud P de su resultante es el cortante en la sección. Al dividir el cortante P entre el área A de la sección transversal, se obtiene el esfuerzo cortante promedio en la sección. Representando el esfuerzo cortante con la letra griega t (tau), se escribe.
Debe enfatizarse que el valor obtenido es un valor promedio para el esfuerzo cortante sobre toda la sección. Al contrario de lo dicho con anterioridad para los esfuerzos normales, en este caso no puede suponerse que la distribución de los esfuerzos cortantes a través de una sección sea uniforme. Como se verá en el capítulo 6, el valor real t del esfuerzo cortante varía de cero en la superficie del elemento hasta un valor máximo tmáx que puede ser mucho mayor que el valor promedio, tprom.
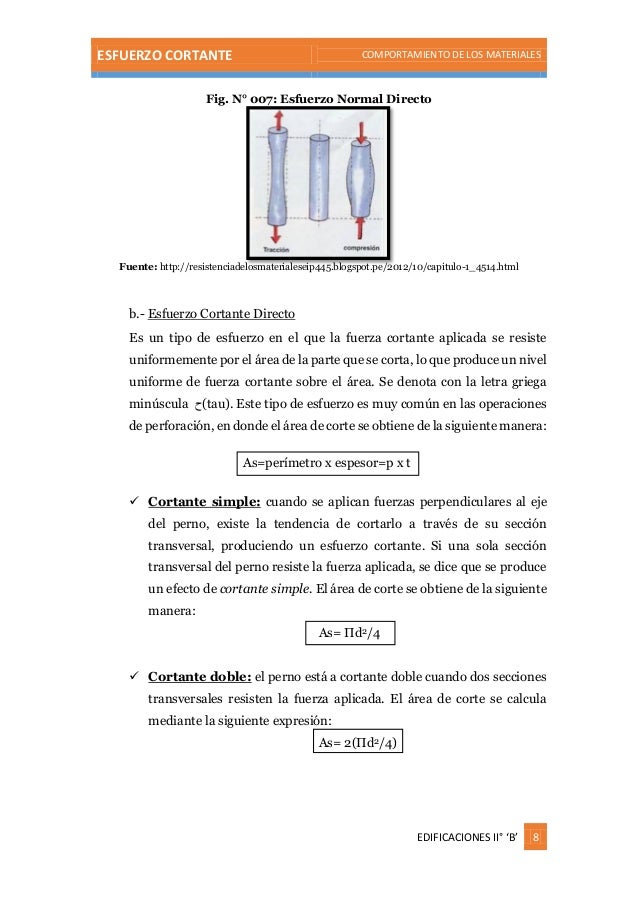
Los esfuerzos cortantes se encuentran comúnmente en pernos, pasadores y remaches utilizados para conectar diversos elementos estructurales y componentes de máquinas (figura 1.17). Considere dos placas A y B conectadas por un perno CD (figura 1.18). Si a las placas se les somete a fuerzas de tensión de magnitud F, se desarrollarán esfuerzos en la sección del perno que corresponde al plano EE´. Al dibujar los diagramas del perno y de la
porción localizada por encima del plano EE´ (figura 1.19), se concluye que el cortante P en la sección es igual a F. Se obtiene el esfuerzo cortante promedio en la sección, de acuerdo con la fórmula (1.8), dividiendo el cortante P = F entre el área A de la sección transversal:
Estado general de esfuerzo. Si el cuerpo está seccionadoadicionalmente por planos paralelos al plano x-z, figura 1-10b, y al plano y-z, figura 1-10c, entonces es posible “separar” un elemento cúbico de volumen de material en el que se representa el estado de esfuerzo que actúa alrededor del punto elegido en el cuerpo. De tal manera, este estado de esfuerzo se caracteriza mediante tres compponentes que actúan sobre cada cara del elemento, figura 1-12
Esfuerzo normal promedio en una barra cargada axialmente.
En esta secciónse determinará la distribucion del esfuerzo promedio que actúa sobre el área de la sección transversal de una barra cargada axialmente, como la que se muestra en la figuara a. Esta barra es prismatica porque todas las secciones transversales son iguales en toda su longitud. Cuando la carga P se aplica a la barra a través del centroide del área de su sección transversal, la barra se deformará de manera uniforme en toda la región central de su longitud, como se muestra b, siempre y cuando el material de la barra sea homogéneo e isotrópico. Un material homogéneo tiene las mismas propiedades físicas de mecánicas en todo su volumen, y un material isotrópico tiene estas mismas propiedades en todas las direcciones.
Diatrivución del esfuerza normal promedio. Si se pasa una sección a través de la barra y se separa en dos partes, entonces el equilibrio requiere que que fuerza normal resultante en la secció sea P, figura c. Dada la deformación uniforme del material, es necesario que la sección transversal esté sometida a una distribucion del esfuerzo normal constante, figura d.
DEFROMACIÓN SIMPLE
Objetivos del tema: Determinar las deformaciones inducidad en sistemas sometidos a cargas axiales.
DEFORMACIÓN SIMPLE
Deformación (δ) se refiere a los cambios en las dimensiones de un miembro estructural cuando este se encuentra sometido a cargas externas. Estas deformaciones serán analizadas en elementos estructurales cargados axialmente, por los que entre las cargas estudiadas estarán las de tensión o compresión.
Un ejemplo de ellos:
Los miembros de una armadura.
Las bielas de los motores de los automóviles.
Los rayos de las ruedas de bicicletas.
DEFORMACIÓN UNITARIA
Todo miembro sometido a cargas externas se deforma debido a la acción de esas fuerzas.
La Deformación Unitaria (ε), se puede definir como la relación existente entre la deformación total y la longitud inicial del elemento, la cual permitirá determinar la deformación del elemento sometido a esfuerzos de tensión o compresión axial.
Entonces, la fórmula de la deformación unitaria es:
ε: Deformación Unitaria
δ: Deformación Total
L: Longitud inicial.
TIPOS DE MATERIALES
Se divide en dos tipos en FRACTILES y DUCTILES.
Materiales Frágiles:
Resistencia última, mayor que la ocurrida en el ensayo de tensión.
No presenten punto de cedencia en ningún caso.
El esfuerzo de rotura incide con el esfuerzo.
Formación de conos de desprendimientos y destrucción de materiales debido a la llegada al límite de rotura.
Su deformación es muy pequeña en comparación con los materiales dúctiles.
Se fractura con mayor facilidad en comparación con un material dúctil.
Propiedades Mecánica de los Materiales:
a)Resistencia mecánica: la resistencia mecánica de un material es su capacidad de resistir fuerzas o esfuerzos. Los tres esfuerzos básicos son:
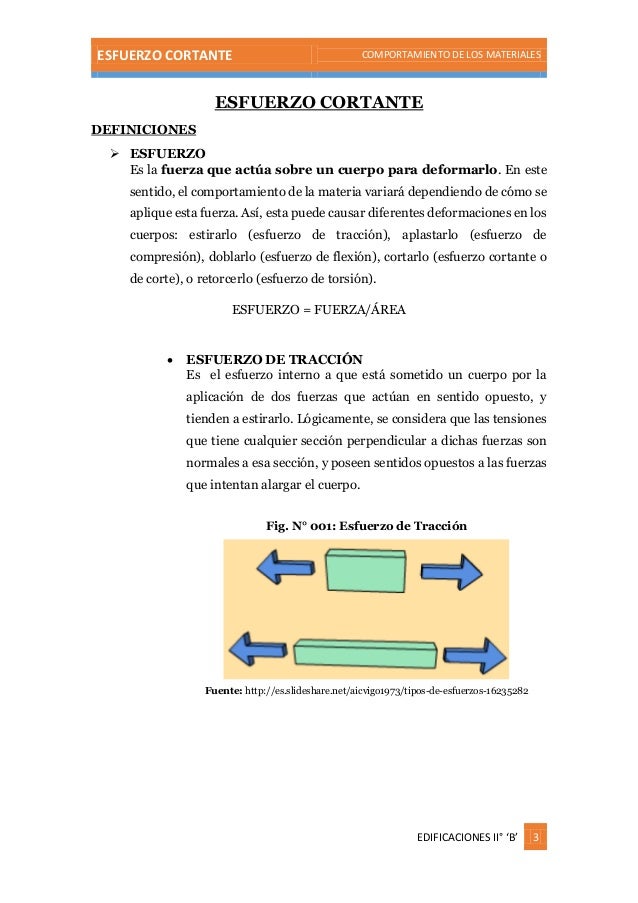
Esfuerzo de Tensión: es aquel que tiende a estirar el miembro y romper el material. Donde las fuerzas que actúan sobre el mismo tienen la misma dirección, magnitud y sentidos opuestos hacia fuera del material. Como se muestra en la siguiente figura. Y viene dado por la siguiente formula:
Esfuerzo de compresión: es aquel que tiende aplastar el material del miembro de carga y acortar al miembro en sí. Donde las fuerzas que actúan sobre el mismo tienen la misma dirección, magnitud y sentidos opuestos hacia dentro del material. Como se muestra en la siguiente figura. Y viene dado por la siguiente formula:
EY DE HOOKE
La ley Hooke expresa que la deformación que experimenta un elemento sometido a carga externa es proporcional a esta.
En el año 1678 por Robert Hooke enuncia la ley de que el esfuerzo es proporcional a la deformación. Pero fue Thomas Young, en el año 1807, quien introdujo la expresión matemática con una constante de proporcionalidad que se llama Módulo de Young.
En donde: σ: es el esfuerzo. ε: es la deformación unitaria. E: módulo de elasticidad
ELEMENTO ESTÁTICAMENTE INDETERMINADOS
Son aquellos elementos cargados axialmente en los que las ecuaciones de equilibrio estático no son suficientes para determinar las fuerzas, que actúan en cada sección. Lo que da por resultados que las reacciones o fuerzas resistivas excedan en número al de ecuaciones independientes de equilibrio que pueden establecerse. Estos casos se llaman estáticamente indeterminados.
A continuación se presentan unos principios generales para enfrentar estos tipos de problemas:
1.En el diagrama de cuerpo libre (DCL) de la estructura o parte de ella, aplicar las ecuaciones del equilibrio estático.
2.Si hay más incógnitas que ecuaciones independientes de equilibrio, obtener nuevas ecuaciones mediante relaciones geométricas entre las deformaciones elásticas producidas por las cargas y por las fuerzas desconocidas: Realizar el diagrama de deformación. ESFUERZO Y DEFORMACIÓN POR ORIGEN TÉRMICO
Los elementos de máquinas cuando están en funcionamiento sufren cambios de temperatura que provocan deformaciones en estos productos de estos diferenciales de temperatura.
Algunos ejemplos de ellos son: las piezas de los motores, hornos, máquinas herramientas (fresadoras, tornos, cortadoras), equipos de moldeo y extrusión de plástico.
La mayoría de los metales se dilatan al aumentar la temperatura, aunque algunos se contraen y otros permanecen del mismo tamaño. Estos cambios de dimensiones esta determinado por el coeficiente de expansión térmica.
Coeficiente de expansión térmica (α): Es la propiedad de un material que indica la cantidad de cambio unitario dimensional con un cambio unitario de temperatura.
Las unidades en que se exprese el coeficiente de expansión térmica son:
E.U.G
SI
Expansión Térmica: Son las variaciones de dimensión en un material producto de los cambios de temperatura en el mismo. Y la ecuación es la siguiente:
En donde:
ST = Expansión Térmica
a = Coeficiente de Expansión Térmica
L = Longitud inicial del miembro
ΔT = Cambio de temperatura
Deformación multiaxial.
Carga multiaxial: Los elementos delgados sometidos a cargas axiales, es decir, a fuerzas dirigidas a lo largo de un solo eje. Escogiendo este eje como el eje X, y llamando P a la fuerza interna en una posición dada, los esfuerzos correspondientes resultaron ser σx=P/A, σy=0 y σz=0.
Se considerarán ahora elementos estructurales sometidos a fuerzas que actúan en las direcciones de los tres ejes coordenados produciendo los esfuerzos σx,σy y σz, todos diferentes de cero. Esta condición se denomina carga multiaxial. Sea un elemento de material en forma de cubo. Puede suponerse unitaria la arista del cubo. Bajo la carga multiaxial el elemento se convierte en un paralelepípedo rectangular de lados 1 + x, 1 + y y1 + z, en donde x, y, z, son las deformaciones normales en las direcciones de los ejes coordenados. Debe observarse que, como resultado de las deformaciones de otros elementos del material, el elemento estudiado puede también experimentar una traslación, pero aquí solo concierne la deformación real del elemento y no cualquier posible desplazamiento de cuerpo rígido. Para expresar los componentes de la deformación x, y, z en términos de los esfuerzos x, y, z se consideran separadamente el efecto de cada componente del esfuerzo y se combinan los resultados obtenidos.La aproximación que se utiliza en este punto se basa en el principio de la superposición. El efecto de una combinación de cargas en una estructura se puede obtener determinando separadamente los efectos de las diferentes cargas y combinando los resultados obtenidos siempre que se cumplan las siguientes condiciones: Cada efecto está linealmente relacionado con la carga que lo produce.
LEY DE HOOKE
Donde es la fuerza recuperadora que ejerce el resorte debido a la deformación y es la constante de elasticidad del resorte. La constante de elasticidad , es una característica del mismo, depende sólo de la forma del resorte y del material con que se ha construido. Debe ponerse el signo menos dado que el sentido de , como se ve en la ilustración, será siempre el opuesto al de la deformación .
Si una vez alcanzado el equilibrio, es decir cuando , tiramos de , produciendo en el resorte un alargamiento suplementario , con relación a la posición de equilibrio, y dejamos el sistema en libertad, observaremos que el resorte comienza a oscilar alrededor de la posición de equilibrio
DEFORMACIÓN UNITARIA CORTANTE
La deformación de un cuerpo por lo general implica cambios en el tamaño y en la forma de éste. Los cambios de tamaño están asociados naturalmente con los alargamientos del cuerpo. Los cambios en la forma resultan no sólo de alargamientos sino también de cambios locales en los ángulos entre líneas del cuerpo que, inicialmente, son perpendiculares.
MÓDULO DE ELASTICIDAD
Las curvas de las figuras a y b son ejemplos del comportamiento elástico, cuando las cargas cesan, el material recupera su forma original. Una tira de caucho es aparentemente elástica; parece retornar a su longitud original al retirar una carga de tensión que actúe sobre ella. La figura es típica de un comportamiento inelástico, es decir, que queda una deformación permanente al cesar la carga. Un material dado se puede comportar en forma elástica un cierto intervalo de valores de esfuerzos y deformaciones unitarias y en forma inelástica en un intervalo mayor.
MÓDULO DE RIGIDEZ
Para un material elástico lineal e isótropo, el módulo de elasticidad transversal es una constante con el mismo valor para todas las direcciones del espacio. En materiales anisótropos se pueden definir varios módulos de elasticidad transversal, y en los materiales elásticos no lineales dicho módulo no es una constante sino que es una función dependiente del grado de deformación.
DISTRIBUCIÓN DEL ESFUERZO Y DE LA DEFORMACIÓN BAJO CARGA AXIAL
Se ha supuesto hasta ahora que en un elemento cargado axialmente los esfuerzos normales están uniformemente distribuidos en cualquier sección perpendicular al eje del elemento. Para determinar los esfuerzos reales en una sección dada del elemento es necesario solucionar un problema estáticamente indeterminado.
Los problemas estáticamente,indeterminados que incluyen la determinación de fuerzas pueden resolverse teniendo en cuenta las deformaciones causadas por estas fuerzas. Es razonable concluir entonces que para calcular los esfuerzos en un elemento es necesario analizar las deformaciones producidas por los esfuerzos.
FACTOR DE SEGURIDAD
El coeficiente de seguridad (también conocido como factor de seguridad) es el cociente entre el valor calculado de la capacidad máxima de un sistema y el valor del requerimiento esperado real a que se verá sometido. Por este motivo es un número mayor que uno, que indica la capacidad en exceso que tiene el sistema por sobre sus requerimientos.
En este sentido, en ingeniería, arquitectura y otras ciencias aplicadas, es común, y en algunos casos imprescindible, que los cálculos de dimensionado de elementos o componentes de maquinaria, estructuras constructivas, instalaciones o dispositivos en general, incluyan un coeficiente de seguridad que garantice que bajo desviaciones aleatorias de los requerimientos previstos, exista un margen extra de prestaciones por encima de las mínimas estrictamente necesarias.
Los coeficientes de seguridad se aplican en todos los campos de la ingeniería, tanto eléctrica, como mecánica o civil, etc.
NORMATIVIDAD Y DEFORMACIÓN
La diversidad de los miembros de ASTM es quizás su calidad más sobresaliente, y es en gran parte lo que distingue el proceso de desarrollo y aprobación de ASTM del de otras organizaciones. En ASTM el desarrollo de normas significa colaborar codo a codo con los competidores, clientes, organismos de regulación y otros grupos interesados de todo el mundo para debatir asuntos técnicos, compartir información relacionada con la investigación e intercambiar conocimientos. Por medio del proceso de ASTM estos grupos interesados aprenden a explotar su diversidad y a colaborar entre ellos para resolver sus diferencias durante el proceso de desarrollo de normas y no después. Junto con este sistema cooperativo para el desarrollo de normas se encuentra el asegurar un proceso justo por medio de: 1) un equilibrio requerido de intereses entre los productores, los usuarios y los miembros generales y 2) un proceso de votación que asegura la observación de las reglas.
El proceso de ASTM supera lo que las entidades podrían hacer individualmente debido a que enlaza las diferentes tecnologías, combina recursos y sobrepasa las diferencias entre los competidores. Como resultado se obtiene un producto de la más alta credibilidad, integridad y aceptación en el mercado. El entendimiento de la jerarquía que existe dentro de ASTM es fundamental para el reconocimiento del valor del proceso de desarrollo y aprobación de las normas de ASTM. La jerarquía se compone de tres niveles básicos: los comités principales, los subcomités y los grupos de trabajo. Los grupos de trabajo realizan la mayor parte del trabajo preparativo y de la investigación que forman la base para el desarrollo de los proyectos de las normas. Una vez que el grupo ha completado su trabajo, pasa esos proyectos por los diferentes niveles de la jerarquía para su revisión y votación. La norma debe obtener la aprobación del subcomité, del comité principal y de la Sociedad antes de convertirse en una norma oficial de ASTM. Los requisitos de las votaciones se ejercen en cada uno de los niveles para asegurar un proceso justo. Cuando el proyecto ha sido revisado y aceptado en todos los niveles, éste se convierte en una norma de ASTM y se publica. Dependiendo de la necesidad para la norma, el desarrollo del proyecto y la aprobación pueden llevarse a cabo en sólo unos meses, en un año o en más tiempo.
ELEMENTOS SUJETOS A TORSIÓN
CALCULO DE ARBOLES Y TRANSMICION DE POTENCIA
Cálculo de Árboles y Ejes
Arboles: el termino árbol se refiere a un elemento giratorio que transmite potencia, un eje es un elemento estacionario sobre el que hay montadas ruedas giratorias, poleas, etc. Un árbol de transmisión, llamado también árbol principal, es el que recibe potencia de una maquina motriz y la trasmite a maquinas conectadas por medio de correas o cadenas, usualmente desde varios puntos en toda su longitud. Los arboles interpuestos entre el árbol principal y una maquina impulsada reciben diversos nombres, tales como arboles de contramarcha o secundarios. Por este motivo los ejes se calculan a flexión y los arboles a flexo torsión.
Dimensionamiento por resistencia:
Dado el estudio de ejes o árboles, se debe empezar por el estudio “Estático” del elemento cargado planteando las ecuaciones de equilibrio y obteniendo las reacciones en los apoyos.
Si un eje tiene montadas sobre el varias ruedas dentadas o poleas, las diversas secciones del eje estarán sometidas a momentos torsión diferentes a causa de que la potencia total entregada al árbol se toma fraccionadamente en varios puntos.
De aquí que hay que tener en cuenta la magnitud del par en cada parte del eje. Entonces se estudia la distribución del momento flector para lo que se pueden trazar a mano alzada los diagramas de esfuerzos cortantes y momentos flectores.
Mediante este examen preliminar, que es un poco problema de mecánica, se puede apreciar la sección en que el momento flector es máximo y la sección en que el momento de torsión es máximo. Si estos máximos tienen lugar en la misma sección, se determina el diámetro necesario para esta. Y se le utiliza para todo el árbol cuando el diámetro haya de ser constante.
Si los máximos no tienen lugar en la misma sección, se determina el diámetro correspondiente a la sección de máximo momento de torsión y el correspondiente a la sección de máximo momento flector y se utiliza el mayor valor.
Luego de este estudio en el caso de la flexión se procede al cálculo del momento flector en la sección mas desfavorable, teniendo en cuenta que la fuerza actuante sobre el elemento es la suma de T1 ( tracción en el ramal tirante) y T2 (tracción en el ramal flojo). Resultando que las fuerzas flectoras será: Ffl= X. (T1 + T2)
X= 2 para correas planas
X= 1.5 para correas en V
X= 1 para engranajes.
Obteniendo el momento flector, el cálculo por resistencia se reduce: σ = Mfl/ W ≤ σ adm
σ 1= Esfuerzo normal.
σ adm= tensión admisible el material.
W= módulo de resistencia de la sección.
Mfl= momento flector.
El módulo de resistencia de la sección rectangular W = I/C
Ix = momento de inercia respecto al eje x-x
C= la distancia a la fibra más alejada, medida desde el eje neutro de la sección.
El módulo de resistencia de la sección circular W´= Ip/c
Ip= momento de inercia polar
C= distancia de la fibra más alejada del centro del cirulo (d/2).
Los módulos de resistencia se encuentran tabulados en tablas para distintas secciones.
Por otro lado, para el caso de torsión, se calcula el momento torsor actuante por medio:
Mt = 71620 . N/n (Kg. Cm)
N: potencia en cv
N: r.p.m
Mt = Ft . dp/2
Y luego se procede el cálculo por resistencia: τ= Mt max/ Wp ≤ τ adm
Cargas de flexión en varios planos:
En el caso de un elemento con varias cargas no coplanares, se descomponen estas en los planos horizontales y verticales y se calcula por separado cada uno como un caso simple. Obteniendo los momentos flexores en ambos planos se halla el momento resultante:
Mf= (( Mfver )2 + (Mfhor)2)1/2
Por ultimo como el momento resultante se determina el cálculo por resistencia o por cualquier otro método.
ANGULO DE TORSIÓN
TORSIÓN DE BARRAS CIRCULARES
ESFUERZO AXIAL
TEORIA
FLEXIÓN EN VIGAS
En ingeniería se denomina flexión al tipo de deformación que presenta un elemento estructural alargado en una dirección perpendicular a su eje longitudinal. El término "alargado" se aplica cuando una dimensión es dominante frente a las otras. Un caso típico son las vigas, las que están diseñadas para trabajar, principalmente, por tracción. Igualmente, el concepto de flexión se extiende a elementos estructurales superficiales como placas o láminas.
El rasgo más destacado es que un objeto sometido a flexión presenta una superficie de puntos llamada fibra neutra tal que la distancia a lo largo de cualquier curva contenida en ella no varía con respecto al valor antes de la deformación. El esfuerzo que provoca la flexión se denomina momento flector.
ANGULO DE FLEXIÓN
Lasvigasoarcosson elementos estructurales pensados para trabajar predominantemente en flexión. Geométricamente sonprismas mecánicoscuya rigidez depende, entre otras cosas, delmomento de inerciade la sección transversal de las vigas. Existen dos hipótesis cinemáticas comunes para representar la flexión de vigas y arcos:
La hipótesis de Navier-Euler-Bernoulli. En ella las secciones transversales al eje baricéntrico se consideran en primera aproximación indeformables y se mantienen perpendiculares al mismo (que se curva) tras la deformación.
La hipótesis de Timoshenko. En esta hipótesis se admite que las secciones transversales perpendiculares al eje baricéntrico pasen a formar un ángulo con ese eje baricéntrico por efecto del esfuerzo cortante.
Viga en voladizo de sección cuadrada sometida a flexión recta simple, mediante una carga en el extremo libre. La animación muestra una simulación mediante el método de los elementos finitos, donde se observan tensiones crecientes cerca de la sección empotrada a medida que se incrementa la carga (y también la deflexión debida a ella).
La teoría de Euler-Bernoulli para el cálculo de vigas es la que se deriva de la hipótesis cinemática de Euler-Bernouilli, y puede emplearse para calcular tensiones y desplazamientos sobre una viga o arco de longitud de eje grande comparada con el canto máximo o altura de la sección transversal.
Para escribir las fórmulas de la teoría de Euler-Bernouilli conviene tomar un sistema de coordenadas adecuado para describir la geometría, una viga es de hecho un prisma mecánico sobre el que se pueden considerar las coordenadas (s, y, z) con s la distancia a lo largo del eje de la viga e (y, z) las coordenadas sobre la sección transversal. Para el caso de arcos este sistema de coordenas es curvilíneo, aunque para vigas de eje recto puede tomarse como cartesiano (y en ese caso s se nombra como x). Para una viga de sección recta la tensión el caso de flexión compuesta esviada la tensión viene dada por la fórmula de Navier:
Si la dirección de los ejes de coordenadas (y, z) se toman coincidentes con las direcciones principales de inercia entonces los productos de inercia se anulan y la ecuación anterior se simplifica notablemente. Además si se considera el caso de flexión simple no-desviada las tensiones según el eje son simplemente:
Por otro lado, en este mismo caso de flexión simple no esviada, el campo de desplazamientos, en la hipótesis de Bernoulli, viene dada por la ecuación de la curva elástica:
Donde:
representa la flecha, o desplazamiento vertical, respecto de la posición inicial sin cargas.
representa el momento flector a lo largo de la ordenada x.
representa las cargas a lo largo del eje de la viga.
EFECTOS COMBINADOS
FLEXIÓN EN VIGAS CURVAS
Entendemos por vigas, en general a aquellos elementos en los cuales una de sus dimensiones es mucho mayor que las otras dos que lo componen.
La viga curva en flexión constituye un importante elemento estructural de ingeniería, debido a su utilización en una amplia variedad de aplicaciones; así por ejemplo estructuras como hélices de helicópteros, ventiladores, turbinas y sub-sistemas de estructuras más complejas pueden ser modelados como vigas curvas De igual manera dichas vigas son usadas de forma corriente en la construcción de puentes. Los ejemplos anteriores permiten afirmar que el estudio de la respuesta dinámica de este componente estructural bajo diversas condiciones, ayudaría a entender el comportamiento de ciertas estructuras reales de mayor complejidad sometidas a condiciones similares.
4.1.- ESFUERZOS EN VIGAS CURVAS EN FLEXIÓN
Para determinar la distribución del esfuerzo en un elemento curvo en flexión se que:
La sección transversal tiene un eje de simetría en un plano a lo largo de la longitud de la viga.
Las secciones transversales planas permanecen planas después de la flexión.
El módulo de elasticidad es igual en tracción que en compresión.
El eje neutro y el eje centroidal de una viga curva, no coinciden y el esfuerzo no varía en forma lineal como en una viga recta.
Fig.4.1 Variación lineal de los esfuerzos en una viga recta y su distribución hiperbólica en una viga curva
ro = Radio de la fibra externa.
ri = Radio de la fibra interna.
rn = Radio del eje neutro.
rc = Radio del eje centroidal.
h = Altura de la sección.
co = Distancia del eje neutro a la fibra externa.
ci = Distancia del eje neutro a la fibra interna.
e = Distancia del eje neutro al eje centroidal.
M = Momento flexionante, un M positivo disminuye la curvatura.
El radio del eje neutro viene dado por: (Ec 4.1)
Donde: A = Área de la sección transversal
El esfuerzo se determina por: (Ec 4.2)
La distribución del esfuerzo es hiperbólica y los esfuerzos críticos ocurren en las superficies interna y externa donde: y = ci y y= -corespectivamente, el momento es positivo conforme está representado en la figura.
(Ec 4.3)(Ec4.4)
: Esfuerzo de flexión en la fibra interna.
: Esfuerzo de flexión en la fibra interna.
A este esfuerzo se debe añadir el esfuerzo de tracción.
EjemploN°4.1: Grafique la distribución de los esfuerzos que actúan en toda la sección A-A del gancho de grúa de la fig. La sección transversal es rectangular con b=0.75” y h=4” la carga a levantar es de 5000 lb.
Solución:
Área = A = bh = 0.75 x 4 = 3” pulg2
dA = b.dr
Se sabe que:
Reemplazando valores:
Por tanto la excentricidad:
El momento M (positivo)
El esfuerzo será:
Sustituyendo los valores de r de 2 a 6 se puede elaborar la siguiente tabla:
Tabla 4.1.- Distribución del esfuerzo para 2 < r >6
Sea una barra, sometida a una carga P. Si cortamos a la barra por la sección 1-1 y nos quedamos con la parte de la izquierda, nos aparecen unas fuerzas por unidad de superficie (tensiones) que van a ser uniformes y a las que vamos a llamar σxporque van en la dirección del eje x.
σx = P / A
Si, ahora, cortamos a la barra inicial por la sección oblicua 2-2, de manera que la normal a la sección forme un ángulo φ con el eje de la barra, de donde: σ = σxcos φ
La máxima tensión se produce en los puntos de la sección normal al eje de la barra. Esta máxima tensión vale σx.


































































{kind=link}
{kind=link}